| Basic Parameters |
| Dimension(L×W×H) | mm | 121.7×82×94 | 137.6×88×97 | 148.1×106×112 | 158×130×142.5 | 188.5×162×174 |
| Hollow hole size | mm | 6.5 | 6.5 | 6.5 | 6.5 | 12 |
| Weight | KG | 1.7 | 2.2 | 2.9 | 4.8 | 8.1 |
| Rated speed | RPM | 30 | 30 | 28 | 25 | 16 |
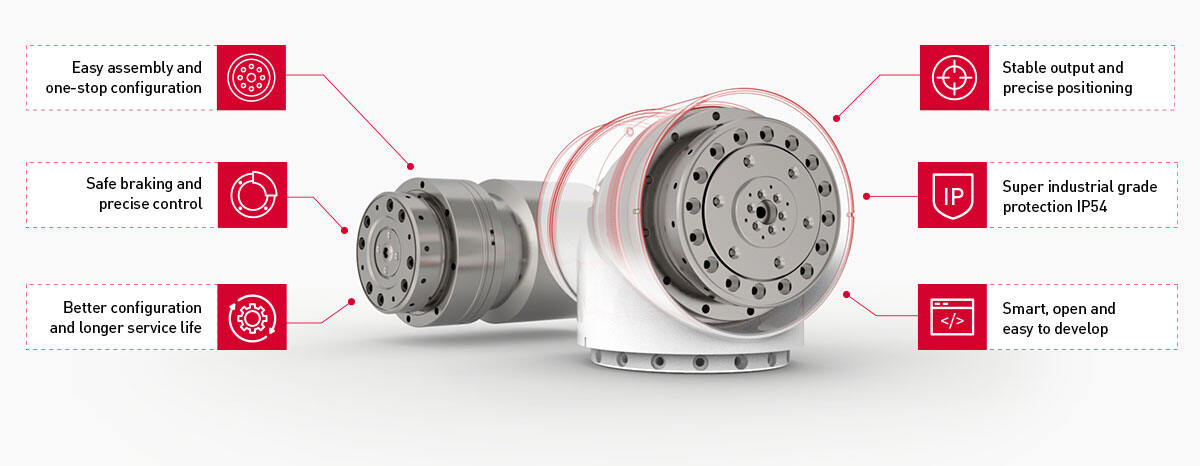
| Motion range of module | ° | ±360 |
| Brake type | – | Spring-actuated brake |
| Reducer Parameters |
| Reduction speed ratio | – | 101 | 101 | 101 | 101 | 161 |
| Rated torque | N.m | 14.25 | 31.35 | 70.2 | 167.4 | 243 |
| Peak torque | N.m | 53.2 | 96.9 | 233.7 | 515.85 | 610.85 |
| Repeatable peak bending moment | N.m | 40 | 70 | 140 | 240 | 460 |
| Momentary peak bending moment | N.m | 80 | 140 | 280 | 480 | 900 |
| Transmission accuracy | arcsec | 60 |
| Hysteresis loss | arcsec | 60 |
| Electrical Parameters |
| Supply voltage | VDC | 48±10% |
| Rated current | A | 1.15 | 2.6 | 5.7 | 12 | 21 |
| Peak current | A | 4.3 | 8 | 18 | 35 | 50 |
| Communication protocol | | CoE(Canopen on EtherCAT) |
| Incremental encoder resolution | P/R | 20000 |
Absolute encoder resolution
| Bits | 19 |
| ° | 0.0007 |
| Absolute encoder accuracy | ° | ±0.025 |
| Absolute encoder repeatability | ° | 0.0007 |
| Working Condition Parameters |
| Protection Class | – | IP54 |
| Working environment temperature | ℃ | 0~+50 |